

文|刘俊宏
编|王一粟
“如果Waymo接下来进展继续缓慢,那将会被全自动驾驶的汽车公司完全赶上。”
在特斯拉FSD入华在即,全行业掀起“端到端”浪潮的时刻,小鹏汽车董事长何小鹏在6月底第一时间远赴美国,实际体验了一把特斯拉FSD和Waymo无人车的最新进展。

何小鹏在美国
最后的结论是,L4技术出发的Waymo体验略好于特斯拉。
“Waymo时隔六个月没有什么进步。AI时代,6个月其实可以做很多事情。”何小鹏感叹,这次体验刷新了“智驾技术+大模型端到端”所体现的进化速度的认知。
大模型端到端对智驾的进化速度到底有多快?
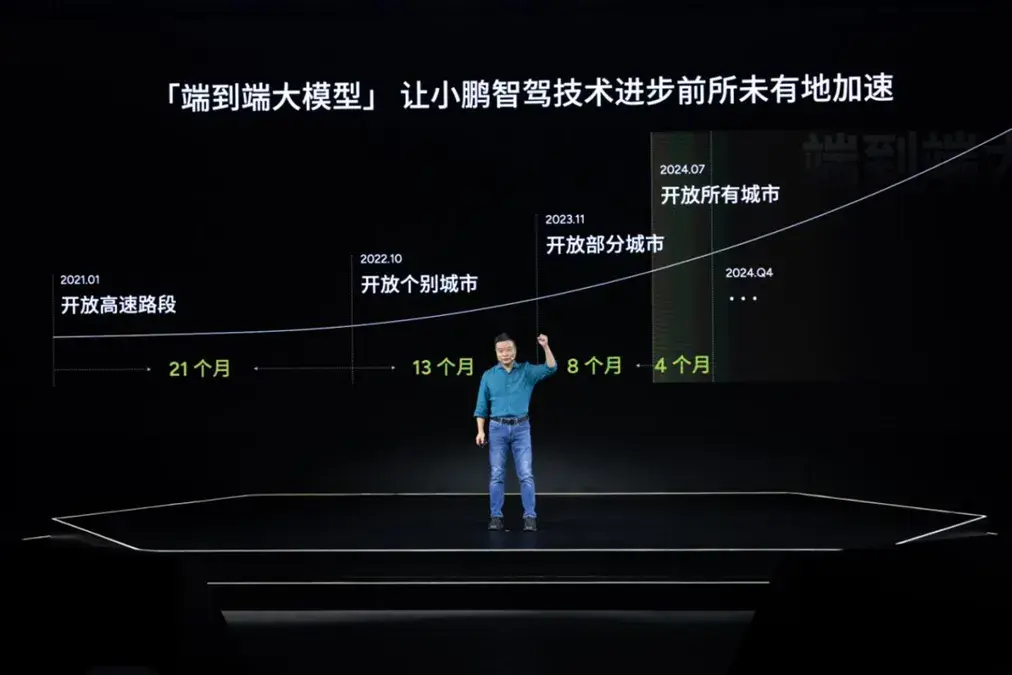
7月30日,何小鹏以“不限城市、不限路线、不限路况,都能使用XNGP高阶智驾”的“全国都好用”目标,掀翻了当前高阶智驾“全国都能开”的“天花板”。这距离5月20日小鹏汽车宣布智驾进入大模型端到端时代仅两个月。
提出“全国都好用”的目标,是何小鹏发现当前“全国都能开”的智驾仍存在大量需要人类接管的场景。当前的智驾一旦到了掉头、环岛、收费站、出入停车场等场景下便立马“歇菜”,整个智驾体验不流畅。
为了解决特定场景的问题,行业曾靠人力写规则,“告诉”汽车该如何操作。但靠规则终究无法穷尽,或许智驾厂商能用人力“硬堆”,让汽车“看懂”中国近万种的红绿灯。但在智驾面对乡间田野小路、小区内部道路,乃至技术出海到全球的需求,何小鹏在会后采访中感叹道,“在以前的规则下,这个路十年都看不到头”。
但在智驾大模型端到端的两天一次的OTA迭代中,何小鹏在行业对技术路径尚未达成共识前,便坚定地认为端到端+大模型能让智驾走到L4的终点,并充满了信心称,“预计到2024年第四季度,XNGP将打通包括ETC收费站、停车场闸机、园区内部道路在内的智驾“断点”,实现真正的“门到门”体验”。
何小鹏对智驾大模型端到端的技术信念,或许如同其在20年前看到移动互联网终将普及,遂创办UC一般。“当无人驾驶的车有足够大规模,不需要五星碰撞,车和座椅形态会产生巨大变化;大屏有变化,你不用坐在司机位或前排点击,就可以用语音、用投影”,在智能汽车时代,何小鹏也看到了技术对造车的终局改变。
小鹏汽车的“技术宅”标签,是何小鹏一直以来技术终局思维的结果。而借助智能化,小鹏汽车能否赢得下一个十年,在销量上弯道超车?
只有大模型“端到端”,才能智驾“门到门”
“2024年,智能驾驶拐点已经到来。”
在本次的小鹏汽车技术发布会上,何小鹏兴奋地对当前智驾行业做了时代的划分。何小鹏发现,曾经需要以“年”为单位计的智驾进展,技术升级到大模型+端到端后,智驾的能力在以“天”计算。
距离上一次小鹏实现“全国都能开”的两个月后,智驾即将在第四季度进入“全国都好用”阶段。
“全国都好用”与“全国都能开”的差距到底有多大?
具体而言,是何小鹏希望以XNGP(小鹏高阶智驾)全新的不限城市、不限路线、不限路况的特性,解决当前高阶智驾使用中存在的诸多反逻辑的“BUG”。
按照之前“全国都能开”的目标,当前的高阶智驾在高速NOA、城市NOA、自动泊车、一键召回等功能下,理论上用户日常使用应该能畅通无阻。但实际上,当用户要求汽车执行完整的驾驶路线时,智驾就“各种办不到”。例如在内部道路会提示无法启动智驾、环岛提示接管、掉头和过ETC时“迷茫”、到达目的地后需要用户手动选择车位泊车。
究其背后原因,还是“大脑”能力不够,智驾不够智能。汽车仅凭传统的智驾规则提示,根本无法解决现实世界的理解和推理问题,也就没办法解决许多复杂场景和Corner case。
何小鹏举例,“有的红绿灯和ETC上面写着请直走,等待16秒后左转。这种情况汽车怎么办,靠激光雷达还是云端互联网?”同样,在大部分智驾玩家棘手的环岛场景中,智驾面临的难度,主要来自于需要综合处理更多维度信息。因为在驶出环岛时,相比无保护左转,智驾不仅要选择转向时机,还需要与同向车辆博弈。如此一来,原本流畅的智驾体验就被一个个“难点”切分成了“一段段”的体验。
而这些问题,小鹏通过在今年5月20日引入端到端架构和AI大语言模型的智驾升级,结合小鹏走遍全国2595个城市(含县、地级市)和总里程超过756万公里的实车测试后,智驾系统都将一一解决,真正意义上做到“举一反三”。
何小鹏预期,小鹏将在今年四季度推送能够畅通ETC、小区入口档杆、工厂内部道路等场景的智驾版本,将用户从家门口一路送到办公室大门口的“门到门”。
同时,为了进一步让用户认可智驾的能力,何小鹏还对智驾设置了200公里接管一次的目标。相当于一周接管一次的频率,彻底解除用户使用智驾随时准备接管的“焦虑”。
此外,在大模型端到端的迭代下,小鹏不仅提高了智驾使用的稳定性,还从中训练出了两个新的功能。其中,基于智驾对道路的理解记忆能力,“100 米循迹倒车”功能可以帮助用户将不小心开入“断头路”的汽车一键驶回原位。另一边,基于大模型的多模态输入能力,现在的自动泊车不再必须用手机控制。用户只需要下车用手遮住特定车外摄像头,便能自动触发自动泊车。
看到短短两个月小鹏在智驾上的进化,何小鹏验证了其早前对大模型端到端的猜想,“端到端自动驾驶技术范式,从0到1很难、很慢,但从1到100会非常快”,也更进一步坚定了何小鹏加大投入智驾开发的决心。
当前,小鹏汽车已经拥有了AI算力储备2.51 EFLOPS,并且,面向未来的AI研发投入,何小鹏也担保称,“比今年的35亿,只多不少”。

转型“端到端”,不破不立
去年,特斯拉FSD开辟出智驾端到端方案。即便国内不少玩家也开始跟进,但特斯拉FSD到底是怎么实现大模型+“一体化”端到端的问题,一直困扰着整个智驾行业。
“特斯拉FSD v12云端,那个十亿参数的模型是干什么的?”在上海2024端到端具身智能体技术研讨会上,有人问了这样一个问题。
但遗憾的是无人给出答案,即便参会人员中包括小米自动驾驶部总经理叶航军、华为智能汽车解决方案BU CTO卞红林、滴滴自动驾驶AI Research团队负责人史少帅、蔚来首席AI科学家袁宏辉等一众大佬。
甚至,光轮智能CEO、前蔚来仿真负责人谢晨还提醒道,“摸着特斯拉前进,结果不一定是过河,也可能是掉坑”。
而这个问题的答案,在本次小鹏的技术发布会上被“揭开了一角”——端到端的智驾路线或许对此前的智驾开发是一场彻底的颠覆。
在发布会和会后的采访中,何小鹏和小鹏汽车智能驾驶负责人李力耘回顾推进智驾大模型端到端的进程,“大倒苦水”。
大模型端到端对智驾能力的提升速度,何小鹏在欣喜之余,也请求消费者能够理解大模型优化迭代过程中的不稳定,“升级版本时,可能智驾能力会发生抖动。但整个智驾能力,一定是快速向前的”。
而作为小鹏智驾能力的负责人,李力耘亲身感受到了端到端来临后,对工作的具体影响。
“端到端这座冰山,水面下看不见的部分很多。(虽然)以前好多高效高质量的数据用不上,但(落地端到端过程中)这些全栈自研原始的数据,以及由此构建的闭环能力、体系能力,是真正决定一家车企能否在AI的淘汰赛中经过洗牌,并成功活下来”。
虽然本次小鹏没有透露太多端到端智驾的开发过程,但总结何小鹏和李力耘的发言看到,两人都认为大模型端到端智驾是一场“技术洗牌”;另外,从“传统”智驾开发模式转到端到端,智驾开发会遇到一系列问题,包括损失大量已有数据、大幅度调整开发和组织架构、以及一套全新工程能力配套等一系列问题。
最后,智驾厂商能够保证每次迭代时智驾水平整体升级,但不能保证在每个细分场景中都发挥稳定。
不过,面对如此多的困难和限制,何小鹏认为这都是大模型端到端“不破不立”的成长。
“不是说以前的工作全部白做了,可能有25%到30%的工作白做,但75%-80%的工作都有用。楼要一层一层搭,想跳跃式发展或许有可能,但风险会极高”。何小鹏称。
如此看来,从传统智驾开发直接“跨越”到一体式端到端,几乎是“痴人说梦”。“分段式”跟进端到端,几乎成了中国智驾的最佳选择。
一方面,何小鹏认为,“以前没做过端到端的人,只靠一个模型根本搞不定。从算力到OS、模型、数据、地图、仿真、标定再到工程,这一系列的事情不经历过根本搞不定”;另一方面,“分段式”的端到端方案,实际上也为智驾玩家们“巩固”原有能力的基础上,提供了过渡到“一体化”端到端的手段。
智驾玩家们根据现阶段对端到端的理解,搭建了不同的技术架构。其中,有利用大模型的能力,增加智驾对现实世界理解能力的(例如小鹏、理想);也有利用端到端的高效数据处理能力,提升原本模块化架构的智驾系统(例如长城汽车)。
如果将汽车看作是手机,那么现在的智驾如同20年前的移动互联网。智驾对智能汽车的重要性,恰如何小鹏创办UC时,看到的浏览器作为“超级APP”对整个手机内容的改变。
因此作为技术派,何小鹏预判并拥抱了下个时代的趋势——在智驾成长最快的时代,做好智驾比短时间内销量多少更重要。
何小鹏如此重视智驾,同样也是对“智能化如何重塑汽车”的终局思考,小鹏汽车或许也有了最终的方向。
面对销量焦虑,何小鹏:磨刀不误砍柴工
除何小鹏以外,每一位企业家选择的背后,都体现着出发点不同的终局思考。
面对智能汽车行业的终局,雷军判断,“最后是赢家通吃”。
如果说雷军对智能汽车的思考更偏向于“过往消费电子行业的经验”,那对于智能汽车的终极状态,不少汽车厂商也都给出过自己的答案。
在比亚迪看来,汽车智能就是整车智能,要用智能控制介入到汽车的每一个角落;华为在利用自己多年积累下的智能化和工程能力,改造原本不智能的汽车产品;蔚来则认为,造智能汽车应该从底层做起,从补能方式、底层OS、芯片等层面都要重新造一遍。
反观小鹏汽车,或许也能看到何小鹏对智能汽车的终局思考有一定的感知——如何用智能化技术作为底层,重新定义汽车。
最明显的体现,是在智驾的底层原理上,小鹏智驾的基本逻辑就与其他玩家不太一样。
一般而言,当前高阶智驾的基本原理是BEV+占用网络,大多数智驾厂商更重视汽车的可通过性,对道路物体识别采取的是“点到为止”(主要是识别异形障碍物、行人、锥形桶、路牌、道路信息等)的态度。但小鹏的智驾十分重视对现实世界的理解能力,不断训练智驾能够认识更多的目标物、理解道路信息,比如交警行为指令、指示牌标语、地面指示符号等等。
同样,在智舱的理解上,2024年小鹏的智舱转向到了实用的智能化方向。
不过这次小鹏的智舱OTA亮点不多。结合上次5月20号的更新,小鹏主要拓宽了车机的交互模式。例如利用“NFC贴纸”、苹果Siri和上次的“小P助手”控制汽车。
但深入到具体的优化方向,能看到小鹏在从优化车机系统开始,到这次可以定制车机显示、驾驶模式,逐渐深化座舱对整车的控制能力。
甚至,在加速消费者接受智驾的层面,何小鹏还提出了比“直播挑战”更好的方法——在汽车启动智驾后,能让更多的人看到当前高阶智驾的能力。

如今的小鹏汽车,变得沉稳了许多。
沉稳的资本,或许还是因坚持智能化而“路越走越宽”。何小鹏在对技术的坚持下,也变得越来越乐观,“从前年开始,我们的变化越来越明显,我对长期马拉松长跑的胜利越来越充满信心”。
比起一年前的动荡时刻,如今的小鹏在智能化的积累下,收到了来自大众的合作收入、即将推出更便宜的高价智驾车型(MONA M03),还展望了2026年推出Robotaxi。
而面对是否会有销量焦虑的问题,何小鹏认为当下最重要的还是打磨好AI,“磨刀不误砍柴工。过去十几个月来,小鹏都在磨刀阶段”。或许,在自动驾驶尚未彻底改变智能汽车形态之前,在如今车市的价格和销量内卷的牌桌之下,还藏着一个要掀桌子的玩家。
本文来自投稿,不代表增长黑客立场,如若转载,请注明出处:https://www.growthhk.cn/cgo/121892.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 